Menü
Human-centered Interactive Artificial Intelligence Data-Incubation Center
Read on »
Holistic and adaptivE Interface Design for human-technology Interactions
Automatisierte Entwurfsmethoden für hocheffiziente integrierte Sensormodule in Edge-Computing-Anwendungen
Cooperation with Continental
Computer-Vision, Machine-Learning..
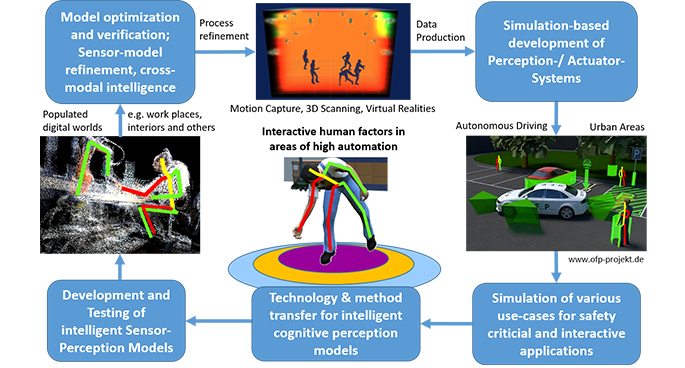
Detailed capture and simulation of human movements.