
Open Fusion Platform (OFP)
Goal of the overall project is the development of a fusion platform with open interfaces in order to support the development of highly and semiautonomous driving functionalities on a level close to series production. Developing open interfaces allows other OEMs and Tier1s to seamlessly integrate their products into the platform.
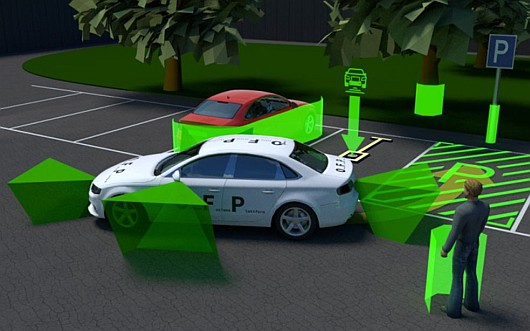
Main Use-Case: An electric vehicle drives highly automated to a charging station and localizes itself precisely. After charging continues the vehicle continues autonomously to a normal free parking space. Within the consortium we develop intelligent processes enabling the development of novel Computer-Vision recognition tasks, i.e. for dynamic objects, especially pedestrians.
Basic data
Project duration: January 2016 - March 2019 Funded by: BMBF Coordinator: HELLA GmbH & Co. KGaA Project Partners: Hella KGaA Hueck & Co., Deutsches Zentrum für Luft-und Raumfahrt, Elektrobit Automotive GmbH, Infineon Technologies AG, InnoSenT GmbH, Hella Aglaia Mobile Vision GmbH, Geschäftsstelle Elektromobilität RWTH Aachen, Streetscooter Research GmbH, TWT GmbH Science & Innovation

For more detailed information visit the project website.



